Overview
Dynamic Robot Planner with Contextual Awareness via LLM (DynaCon) was a collaborative project I worked with TaeHyeon Kim, Shyam Sundar Kannan, Vishnunandan L. N. Venkatesh, and supervised by professor Donghan Kim and Byung-Cheol Min.
The paper was submitted to the IEEE International Conference on Robotics and Automation (ICRA 2024).
Goal
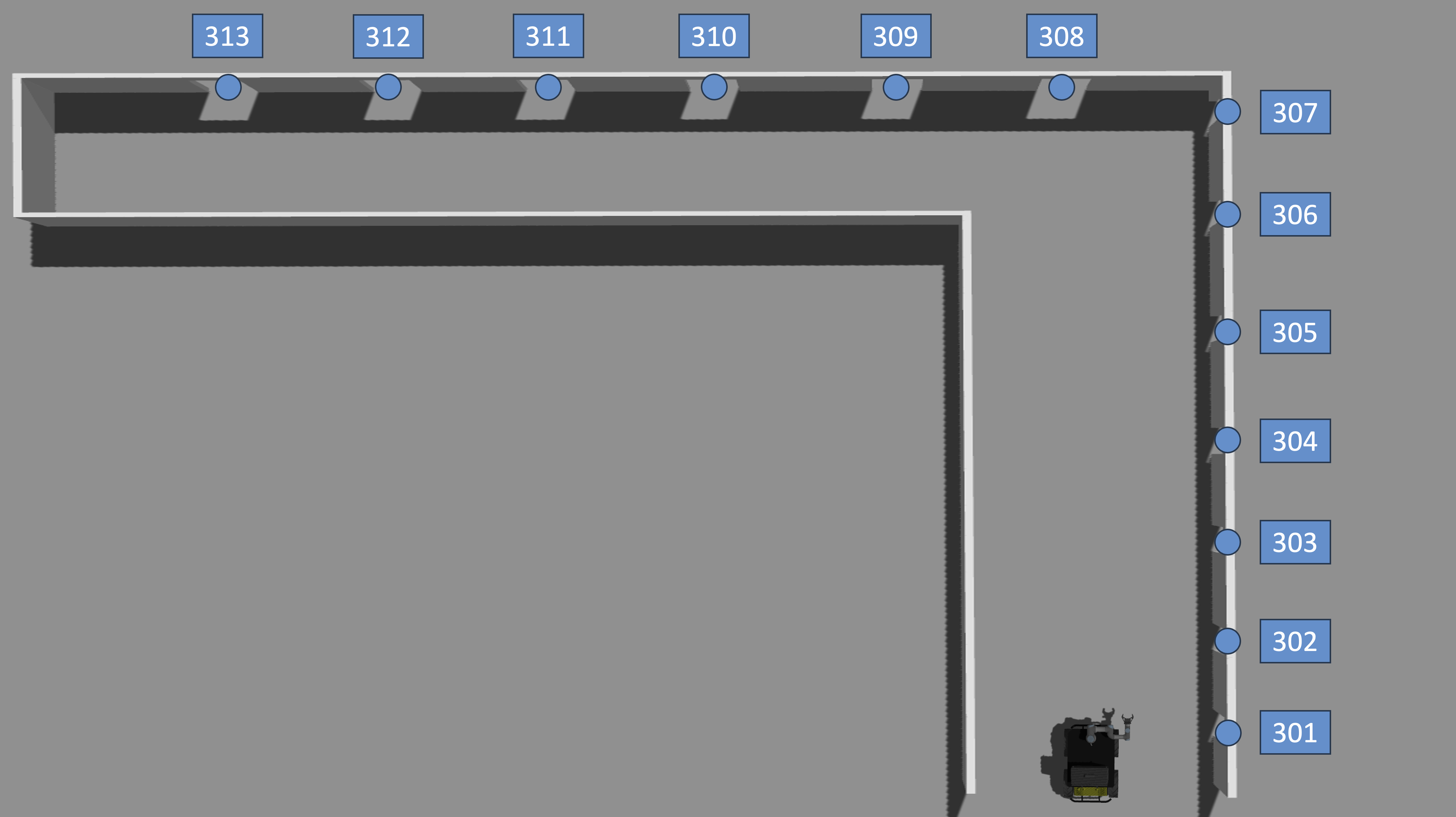
- To provide mobile robots with contextual awareness and dynamic adaptability during navigation, eliminating the reliance of traditional maps.
Description
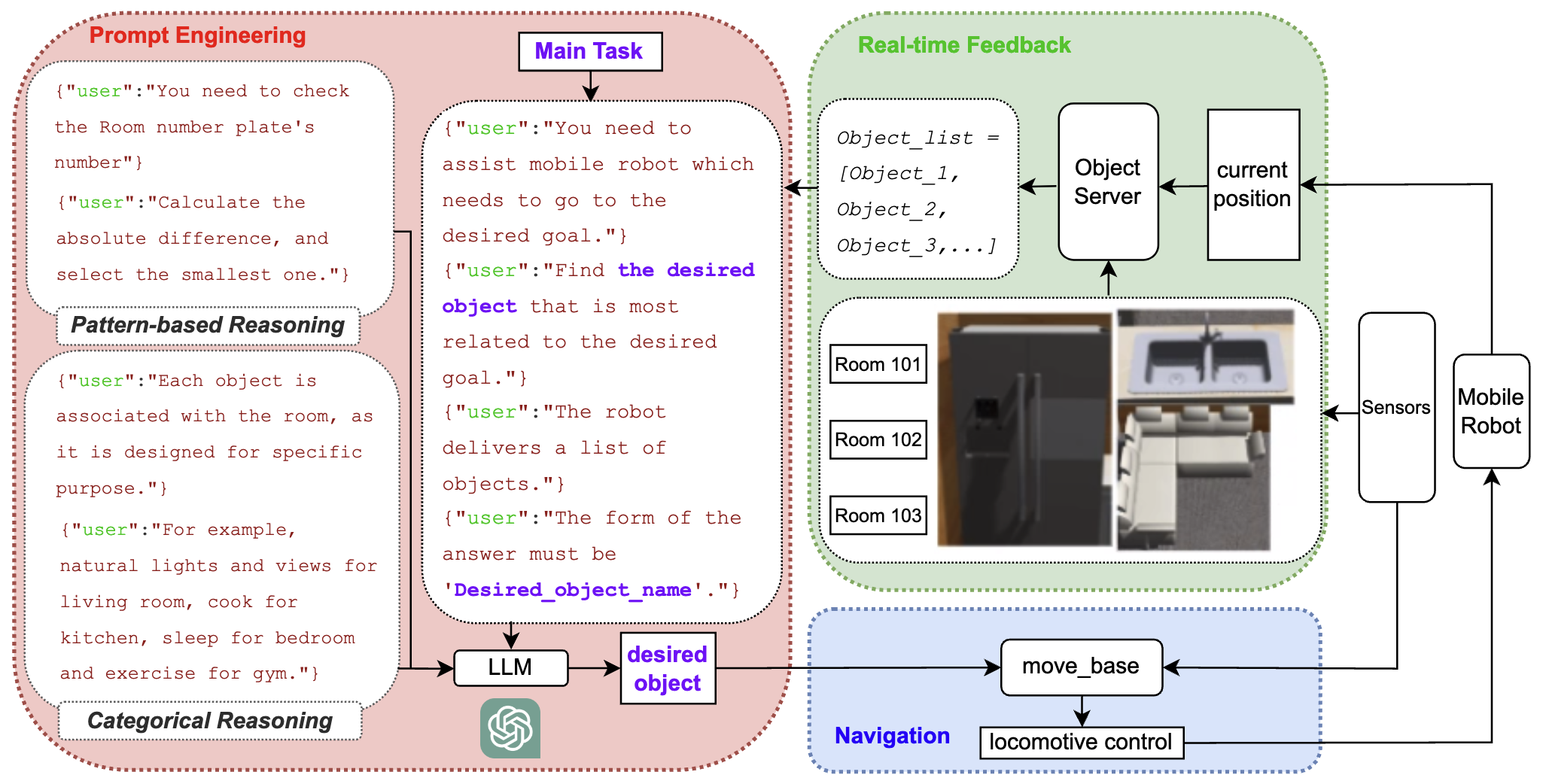
DynaCon consists of real-time feedback, prompt engineering, and navigation task.
In the real-time feedback section, the Object Server continuously provides an information about nearby objects and the current position of the robot to update the object list.
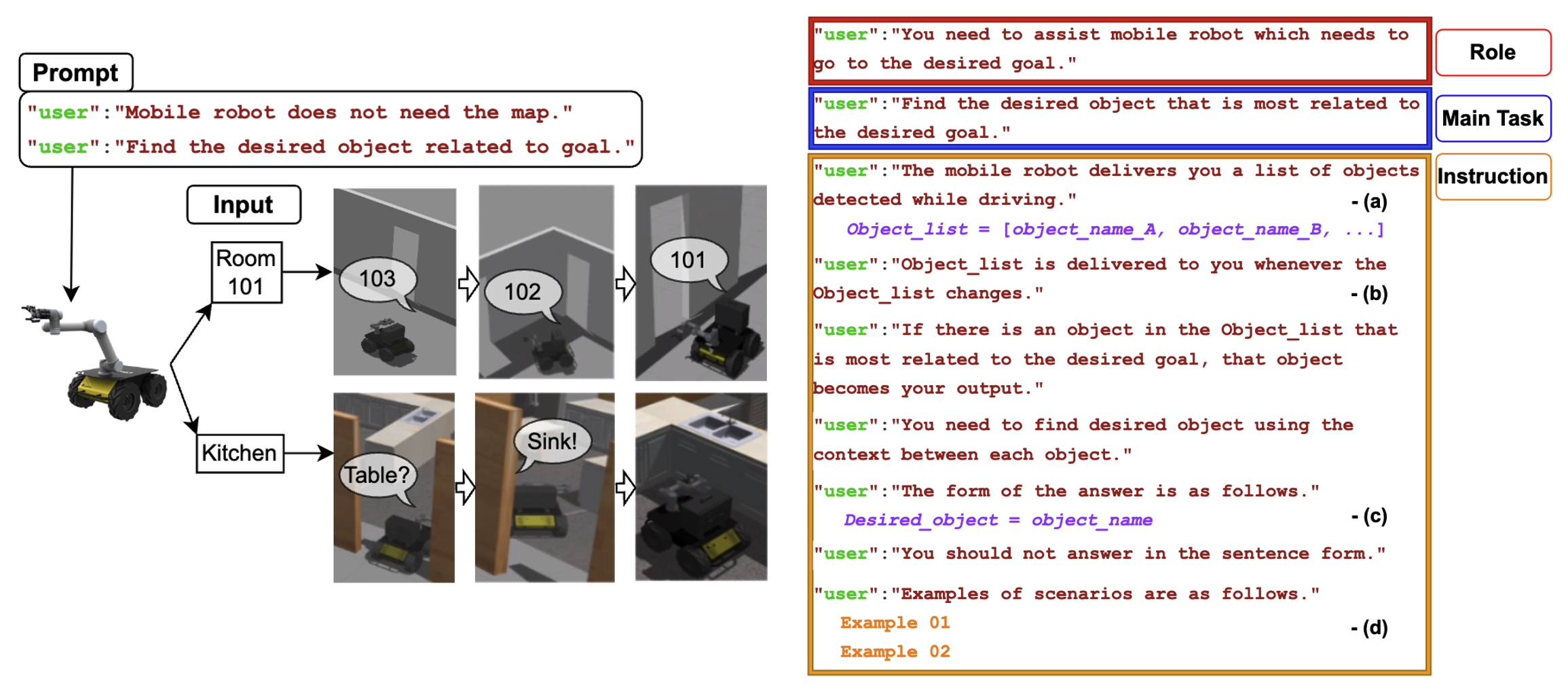
In the prompt engineering phase, a uniquely structured prompt is sent to the Large Language Model (LLM) to output the desired object, serving as the main task of navigation.
For navigation task, ROS1 move_base package is applied.