Overview
This was a collaborative project I worked with Seung Jin Yang under the guidance of the Robotics Innovatory lab.
It was submitted to AI-ICT Creative Idea Contest hosted by Sungkyunkwan University. - 3rd prize
Goal
To design a scalable mobile platform hardware that can support additional sensors, algorithms, and hardware for future use.
Also, to enable basic navigation using a LiDAR sensor.
Description
- Hardware
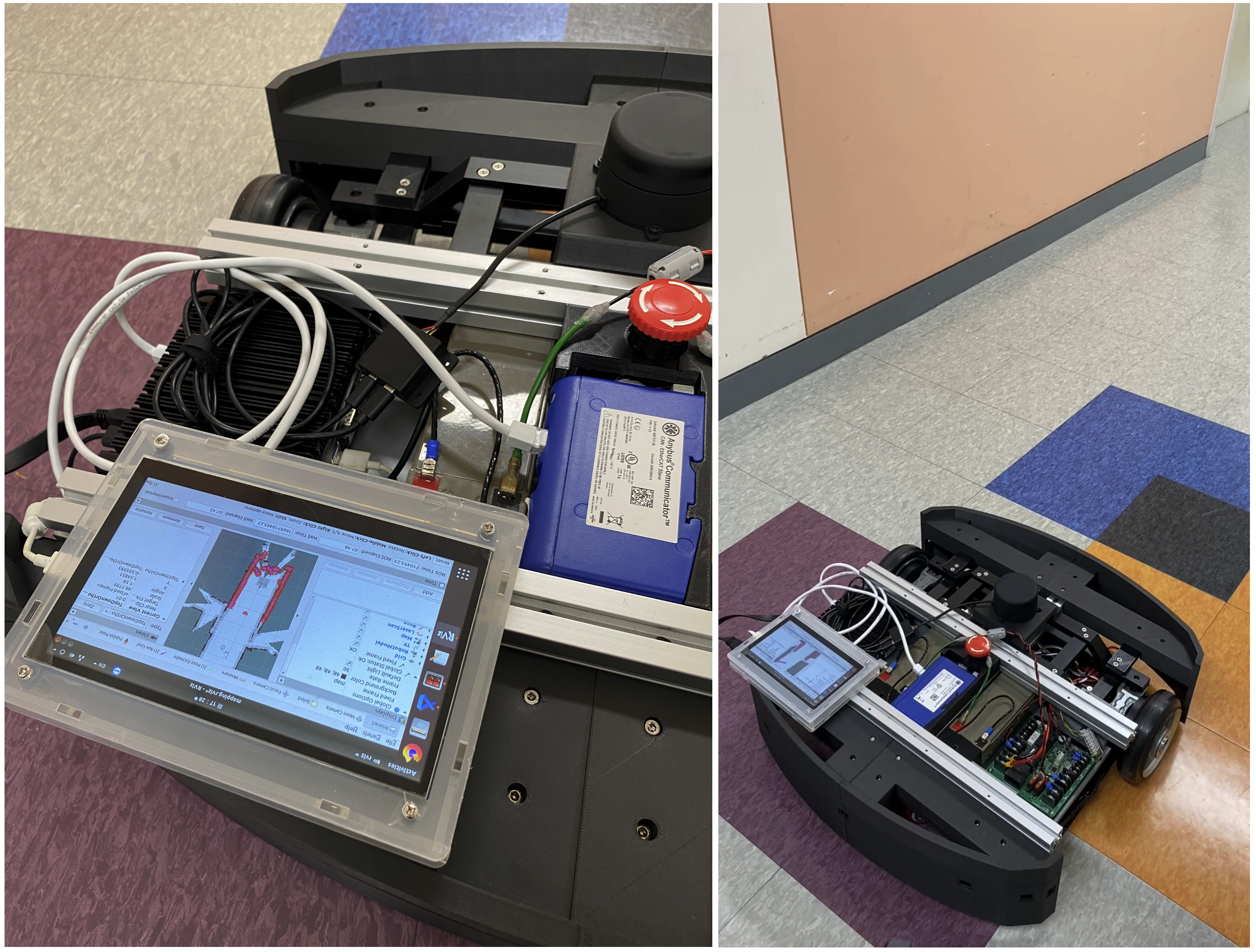
- Designed with reference to various commercial mobile robots, it maintains a low height to allow for additional modules on top and adopts a rounded shape to account for environments with many people nearby.
- Using aluminum profiles for the internal structure to enhance robot stability.
- For cost efficiency, the robot’s exterior was designed in AutoDesk Inventor and then 3D printed for assembly.
- Navigation
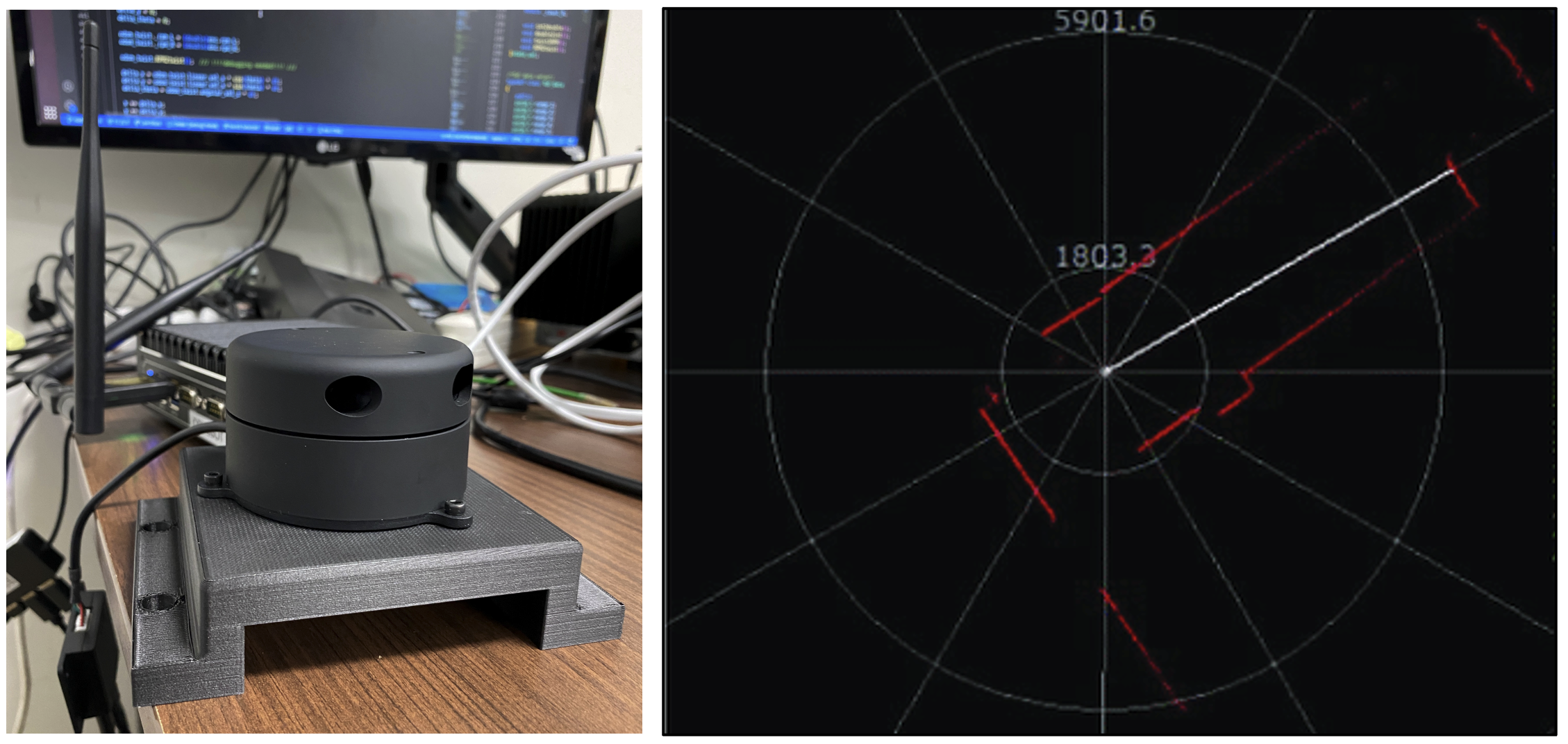
- Utilizes a YDLidar sensor to gather surrounding environmental data, enabling distance measurements essential for navigation tasks.
- Operates in ROS1 Noetic environment.
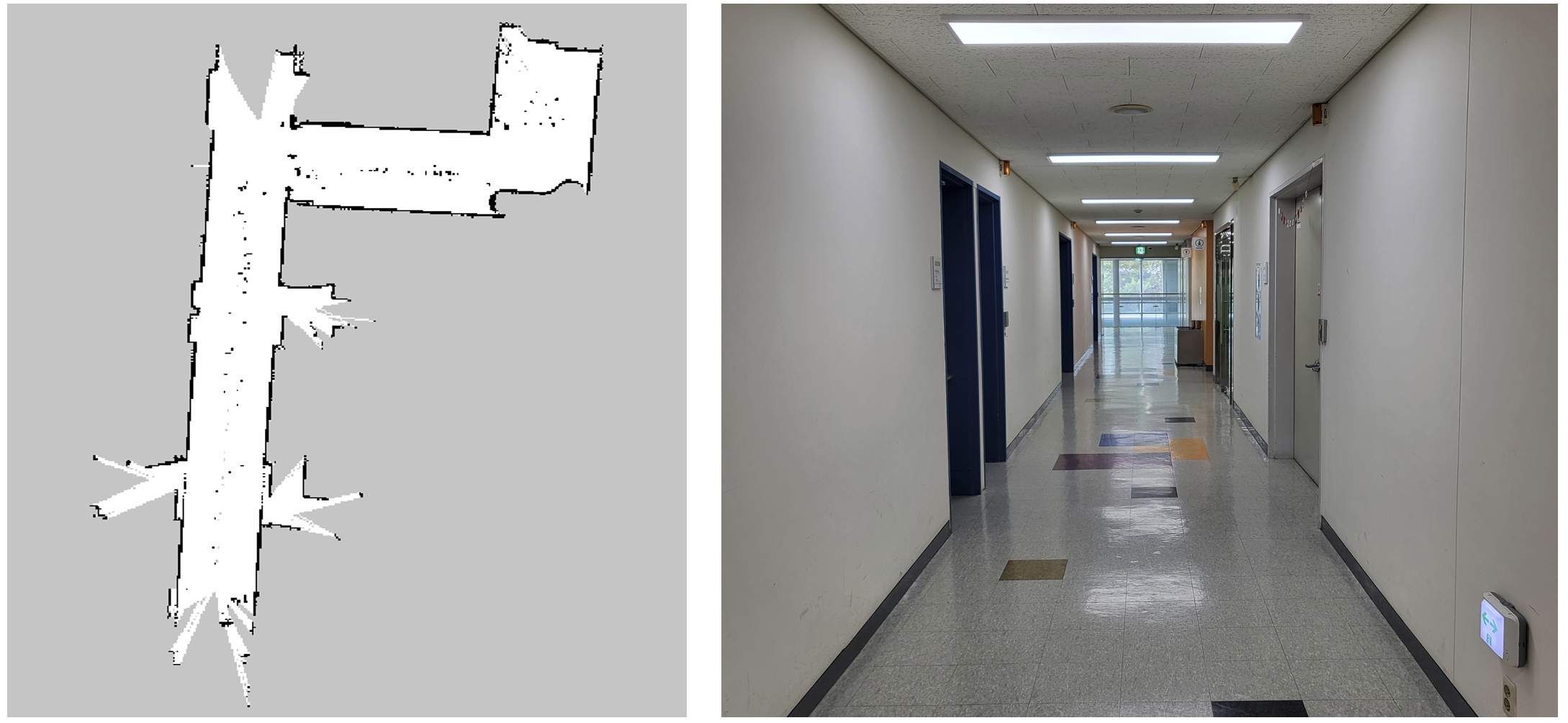
- Mapping: Hector mapping
- Localization: AMCL
- Global navigation: A* algorithm
- Local navigation: Dynamic Window Approach (DWA)